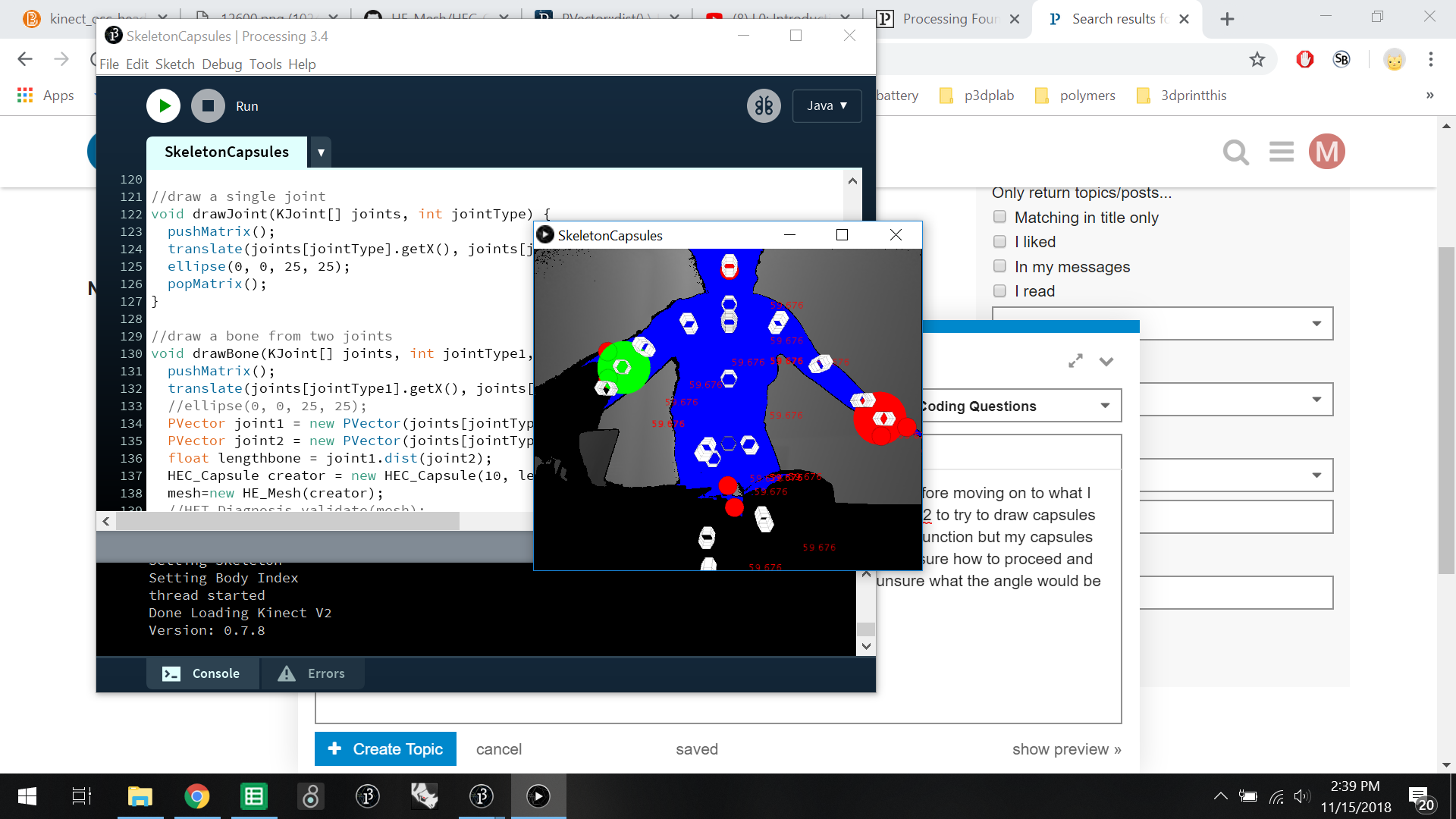
Hi, I am using the kinectpv2 library and hemesh library to just do something basic before moving on to what I actually want to do. I have altered the skeleton depth tracking example from kinectpv2 to try to draw capsules in place of the bones. as you see in my sketch, I added the code into the drawBone function but my capsules come out all facing forward and not being rotated into the place of the bone. I am unsure how to proceed and could use some help. I think I mainly need to rotate the capsule into place but unsure what the angle would be or how to find that. thanks for any help…
here is the result i am getting now:
and here is my code:
import java.util.ArrayList;
import KinectPV2.KJoint;
import KinectPV2.*;
import wblut.math.*;
import wblut.processing.*;
import wblut.core.*;
import wblut.hemesh.*;
import wblut.geom.*;
KinectPV2 kinect;
HE_Mesh mesh;
WB_Render render;
void setup() {
size(512, 424, P3D);
kinect = new KinectPV2(this);
//Enables depth and Body tracking (mask image)
kinect.enableDepthMaskImg(true);
kinect.enableSkeletonDepthMap(true);
//createMesh();
//render=new WB_Render(this);
kinect.init();
}
void draw() {
background(0);
image(kinect.getDepthMaskImage(), 0, 0);
//get the skeletons as an Arraylist of KSkeletons
ArrayList<KSkeleton> skeletonArray = kinect.getSkeletonDepthMap();
//individual joints
for (int i = 0; i < skeletonArray.size(); i++) {
KSkeleton skeleton = (KSkeleton) skeletonArray.get(i);
//if the skeleton is being tracked compute the skleton joints
if (skeleton.isTracked()) {
KJoint[] joints = skeleton.getJoints();
color col = skeleton.getIndexColor();
fill(col);
stroke(col);
drawBody(joints);
drawHandState(joints[KinectPV2.JointType_HandRight]);
drawHandState(joints[KinectPV2.JointType_HandLeft]);
}
}
//fill(255);
// noStroke();
// render.drawFaces(mesh);
// noFill();
// stroke(0, 50);
// render.drawEdges(mesh);
// fill(255, 0, 0);
// text(frameRate, 50, 50);
}
//draw the body
void drawBody(KJoint[] joints) {
drawBone(joints, KinectPV2.JointType_Head, KinectPV2.JointType_Neck);
drawBone(joints, KinectPV2.JointType_Neck, KinectPV2.JointType_SpineShoulder);
drawBone(joints, KinectPV2.JointType_SpineShoulder, KinectPV2.JointType_SpineMid);
drawBone(joints, KinectPV2.JointType_SpineMid, KinectPV2.JointType_SpineBase);
drawBone(joints, KinectPV2.JointType_SpineShoulder, KinectPV2.JointType_ShoulderRight);
drawBone(joints, KinectPV2.JointType_SpineShoulder, KinectPV2.JointType_ShoulderLeft);
drawBone(joints, KinectPV2.JointType_SpineBase, KinectPV2.JointType_HipRight);
drawBone(joints, KinectPV2.JointType_SpineBase, KinectPV2.JointType_HipLeft);
// Right Arm
drawBone(joints, KinectPV2.JointType_ShoulderRight, KinectPV2.JointType_ElbowRight);
drawBone(joints, KinectPV2.JointType_ElbowRight, KinectPV2.JointType_WristRight);
drawBone(joints, KinectPV2.JointType_WristRight, KinectPV2.JointType_HandRight);
drawBone(joints, KinectPV2.JointType_HandRight, KinectPV2.JointType_HandTipRight);
drawBone(joints, KinectPV2.JointType_WristRight, KinectPV2.JointType_ThumbRight);
// Left Arm
drawBone(joints, KinectPV2.JointType_ShoulderLeft, KinectPV2.JointType_ElbowLeft);
drawBone(joints, KinectPV2.JointType_ElbowLeft, KinectPV2.JointType_WristLeft);
drawBone(joints, KinectPV2.JointType_WristLeft, KinectPV2.JointType_HandLeft);
drawBone(joints, KinectPV2.JointType_HandLeft, KinectPV2.JointType_HandTipLeft);
drawBone(joints, KinectPV2.JointType_WristLeft, KinectPV2.JointType_ThumbLeft);
// Right Leg
drawBone(joints, KinectPV2.JointType_HipRight, KinectPV2.JointType_KneeRight);
drawBone(joints, KinectPV2.JointType_KneeRight, KinectPV2.JointType_AnkleRight);
drawBone(joints, KinectPV2.JointType_AnkleRight, KinectPV2.JointType_FootRight);
// Left Leg
drawBone(joints, KinectPV2.JointType_HipLeft, KinectPV2.JointType_KneeLeft);
drawBone(joints, KinectPV2.JointType_KneeLeft, KinectPV2.JointType_AnkleLeft);
drawBone(joints, KinectPV2.JointType_AnkleLeft, KinectPV2.JointType_FootLeft);
//Single joints
drawJoint(joints, KinectPV2.JointType_HandTipLeft);
drawJoint(joints, KinectPV2.JointType_HandTipRight);
drawJoint(joints, KinectPV2.JointType_FootLeft);
drawJoint(joints, KinectPV2.JointType_FootRight);
drawJoint(joints, KinectPV2.JointType_ThumbLeft);
drawJoint(joints, KinectPV2.JointType_ThumbRight);
drawJoint(joints, KinectPV2.JointType_Head);
}
//draw a single joint
void drawJoint(KJoint[] joints, int jointType) {
pushMatrix();
translate(joints[jointType].getX(), joints[jointType].getY(), joints[jointType].getZ());
ellipse(0, 0, 25, 25);
popMatrix();
}
//draw a bone from two joints
void drawBone(KJoint[] joints, int jointType1, int jointType2) {
pushMatrix();
translate(joints[jointType1].getX(), joints[jointType1].getY(), joints[jointType1].getZ());
//ellipse(0, 0, 25, 25);
PVector joint1 = new PVector(joints[jointType1].getX(), joints[jointType1].getY(), joints[jointType1].getZ());
PVector joint2 = new PVector(joints[jointType2].getX(), joints[jointType2].getY(), joints[jointType2].getZ());
float lengthbone = joint1.dist(joint2);
HEC_Capsule creator = new HEC_Capsule(10, lengthbone, 6, 6,3);
mesh=new HE_Mesh(creator);
//HET_Diagnosis.validate(mesh);
render=new WB_Render(this);
fill(255);
noStroke();
render.drawFaces(mesh);
noFill();
stroke(0, 50);
render.drawEdges(mesh);
fill(255, 0, 0);
text(frameRate, 50, 50);
popMatrix();
//line(joints[jointType1].getX(), joints[jointType1].getY(), joints[jointType1].getZ(), joints[jointType2].getX(), joints[jointType2].getY(), joints[jointType2].getZ());
}
//draw a ellipse depending on the hand state
void drawHandState(KJoint joint) {
noStroke();
handState(joint.getState());
pushMatrix();
translate(joint.getX(), joint.getY(), joint.getZ());
ellipse(0, 0, 70, 70);
popMatrix();
}
/*
Different hand state
KinectPV2.HandState_Open
KinectPV2.HandState_Closed
KinectPV2.HandState_Lasso
KinectPV2.HandState_NotTracked
*/
//Depending on the hand state change the color
void handState(int handState) {
switch(handState) {
case KinectPV2.HandState_Open:
fill(0, 255, 0);
break;
case KinectPV2.HandState_Closed:
fill(255, 0, 0);
break;
case KinectPV2.HandState_Lasso:
fill(0, 0, 255);
break;
case KinectPV2.HandState_NotTracked:
fill(100, 100, 100);
break;
}
}