please format code with </> button * homework policy * asking questions
Hi Everyone,
I want to scan in 3D and mill these with CAM.
I have access to some nice tools to do so:
- Livox Mid-40 LiDAR
- Fusion 360 and its CAM tools
- production CNC lathe with milling tools
My idea is to do following steps:
- get .csv from the lidar with its point cloud
- calculate a height map from these points
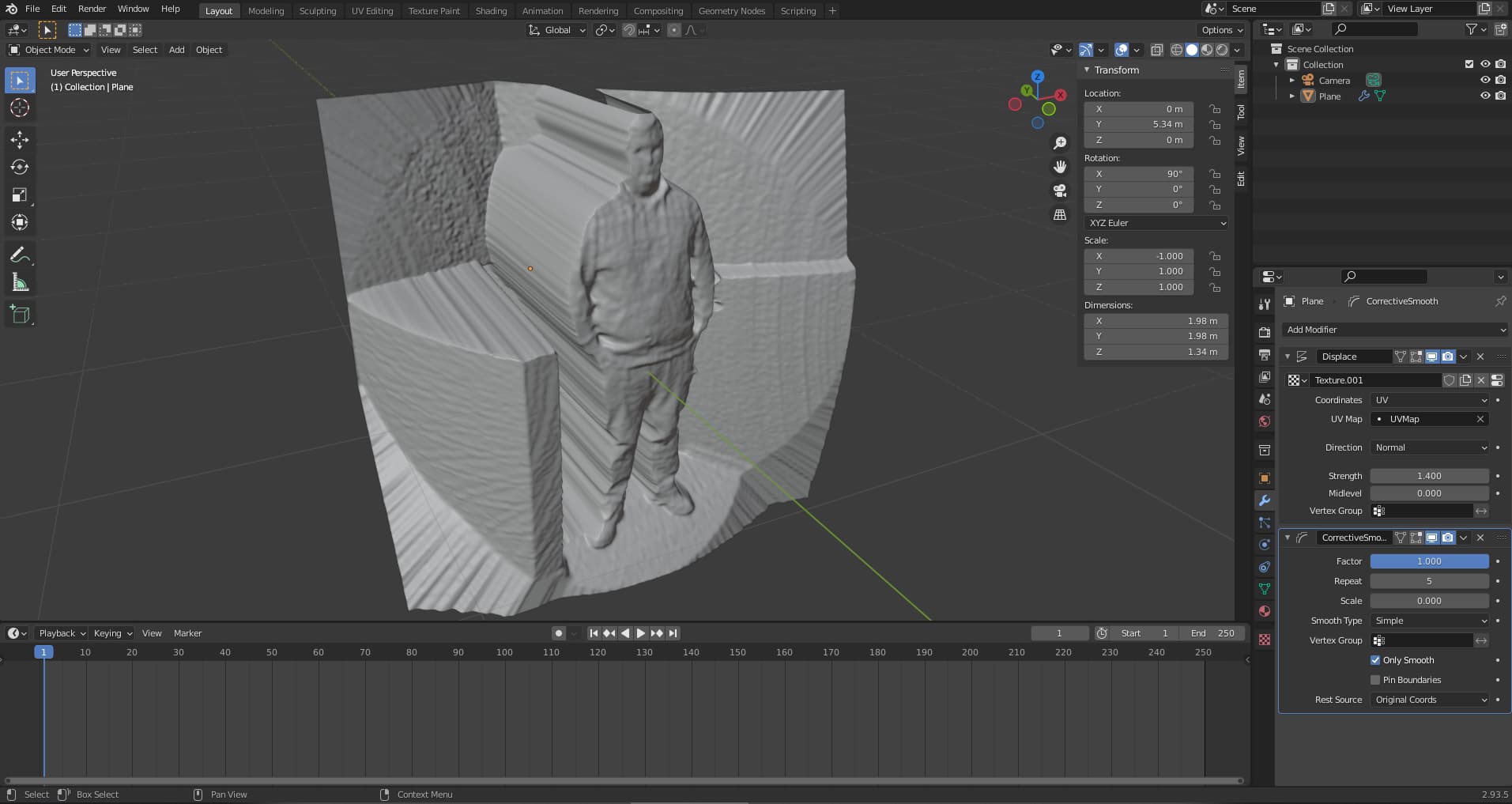
- use blender with the displacement on a plane to create a 3d model (soft modelled)
- import the soft model into Fusion 360 and generate CAM toolpaths
- mill it on the CNC
What i achieved so far:
- scan with the lidar:
- use processing to calculate the heightmap:

- use blender for the model:

Code for processing:
ArrayList<scanPoint>scanPoints = new ArrayList<scanPoint>();
float minX = 0;
float maxX = 0;
float minY = 0;
float maxY = 0;
float minZ = 0;
float maxZ = 0;
float overrideMaxZValue = 1.8;
boolean overrideMaxZ = false;
int counter = 0;
int calculatedPixels = 0;
int calculationStarted = 0;
PImage heightmap;
boolean calculating = false;
void setup(){
size(500,500,P2D);
heightmap = new PImage(width,height);
parseFile();
}
void draw(){
if(!calculating){
image(heightmap,0,0);
}
else{
background(0);
text("Calculated pixels: " + calculatedPixels + " of: "+ (width*height),10,10);
float percentage = (float(calculatedPixels)/( float(width) *float(height)))*100;
text(nf(percentage,0,3) + "%",10,30);
float seconds = (millis()-calculationStarted)/1000;
float minutes = seconds/60;
float hours = minutes/60;
text("Time since calculation start: "+int(hours) + ":"+int(minutes%60)+ ":"+int(seconds)%60,10,50);
float eSeconds = (100/percentage)*(millis()-calculationStarted)/1000;
float eMinutes = eSeconds/60;
float eHours = eMinutes/60;
text("Estimation: "+int(eHours) + ":"+int(eMinutes%60)+ ":"+int(eSeconds)%60,10,70);
}
}
void mouseClicked(){
if(mouseX > 0 && mouseX < width && mouseY > 0 && mouseY < height && mouseButton == LEFT){
calculating = true;
calculationStarted = millis();
thread("drawHeightmapFilled");
}
else if(mouseButton == RIGHT){
heightmap.save("C:/Users/***/Desktop/Privat/heightmaps/heightmap from livox scan.png");
println("saved heightmap");
}
}
void drawHeightmapSimple(){
println("start drawing heightmap");
for(int i = 0; i<scanPoints.size();i++){
scanPoint sp = scanPoints.get(i);
float pX = map(sp.pX,minX,maxX,width,0);
float pY = map(sp.pY,minY,maxY,height,0);
int whiteValue = int(map(sp.pZ,minZ,maxZ,255,0));
color pZ = color(whiteValue,whiteValue,whiteValue);
heightmap.set(int(pX),int(pY),pZ);
calculatedPixels ++;
}
println("done drawing heightmap");
calculating = false;
}
void drawHeightmapFilled(){
println("start drawing heightmap");
for(int X = 0; X<width;X++){
for(int Y = 0; Y<height;Y++){
float distance = 9000;
color pZ = color(0,0,0);
for(int i = 0; i<scanPoints.size();i++){
scanPoint sp = scanPoints.get(i);
float pX = map(sp.pX,minX,maxX,width,0);
float pY = map(sp.pY,minY,maxY,height,0);
float bufferDistance = dist(X,Y,pX,pY);
if(bufferDistance<distance){
distance = bufferDistance;
if(sp.pZ < minZ || sp.pZ > maxZ){
pZ = color(255,0,0);
}
else{
int whiteValue = int(map(sp.pZ,minZ,maxZ,255,0));
pZ = color(whiteValue,whiteValue,whiteValue);
}
}
}
heightmap.set(X,Y,pZ);
calculatedPixels ++;
}
}
println("done drawing heightmap");
calculating = false;
}
void parseFile() {
BufferedReader reader = createReader("C:/Users/***/Desktop/Privat/heightmaps/kopfscan.csv");
String line = null;
try {
while ((line = reader.readLine()) != null) {
String[] coord = split(line, ",");
float Xa = stringToFloat(coord[14]);
float Ya = stringToFloat(coord[15]);
float Za = stringToFloat(coord[13]);
float Z = dist(0,0,0,Xa,Ya,Za);
float X = tan(Xa/Za);
float Y = tan(Ya/Za);
if(X>maxX)maxX = X; else if(X<minX) minX = X;
if(Y>maxY)maxY = Y; else if(Y<minY) minY = Y;
if(Z>maxZ)maxZ = Z; else if(Z<minZ) minZ = Z;
if(counter == 1){
minX = X;
maxX = X;
minY = Y;
maxY = Y;
minZ = Z;
maxZ = Z;
}
if(!Float.isNaN(X) && !Float.isNaN(Y) && !Float.isNaN(Z)){
scanPoints.add(new scanPoint(X,Y,Z));
}
counter++;
}
reader.close();
} catch (IOException e) {
e.printStackTrace();
}
if(overrideMaxZ) maxZ = overrideMaxZValue;
println("maxX: "+maxX+" ||minX: "+minX);
println("maxY: "+maxY+" ||minY: "+minY);
println("maxZ: "+maxZ+" ||minZ: "+minZ);
println("number of points: "+counter);
}
class scanPoint{
float pX = 0;
float pY = 0;
float pZ = 0;
scanPoint(float x, float y, float z){
pX = x;
pY = y;
pZ = z;
}
}
Float stringToFloat(String str){
float buffer = 0;
buffer = float(str);
if(Float.isNaN(buffer)){
if(str.equals("true")){
buffer = 1;
}
else{
buffer = 0;
}
}
return buffer;
}
I have got two problems with my code:
- I do have a curvature error and i think it comes from the perspective view which i calculated in the parseFile() function. A Orthographic view would make more sense for the displacement in blender but then i do have point shadows and overlapping geometry.
- It takes a long time to calculate the heightmap. A scan has ~300k points. I calculate for each pixel the distance to the nearest point and save its Z value. An image of 500x500 takes about 15 minutes. I seperated it into a second thread to show its progress in the draw function. Do i have to seperate the image into even more threads or would CUDA make sense?
I would appreciate any suggestion or comment.
Kind regards,
StainlessHolz




 . I have just to use the original XYZ values and ignore overlapping geometry.
. I have just to use the original XYZ values and ignore overlapping geometry.